출력피드백제어 상태피드백제어 비교 | (2025-05-07) |
상태 피드백 제어 | |
▷
Top
▷
전기전자공학
▷
자동제어
▷
피드백 루프
1. 폐루프 제어의 구분 ※ 폐루프 제어에서, 제어기 구조에 따라, 크게 2가지 방식으로 구분됨 - 출력 피드백 제어 (Output Feedback Control) - 상태 피드백 제어 (State Feedback Control) * (비교) . 출력 피드백 제어는, 단순하지만 제어 성능이 제한되는 반면, . 상태 피드백 제어는, 높은 성능을 보장하지만, 설계,구현에 더 많은 정보(상태 추정)가 필요 * 여기서, 제어기 이란? . 측정된 출력 또는 상태 정보를 기반으로, . 적절한 제어 입력을 생성하여, . 원하는 목표값을 추종하는 핵심요소 2. 출력 피드백 제어 (Output Feedback Control) : (주로, PID 제어기 방식을 말함) ㅇ 출력을 피드백 받고, 이를 토대로 제어하는, 기존의 피드백 제어 방식 ㅇ 특징 - 출력은 직접 측정하기 쉬워, 실현 용이성이 높음 - 전달함수 기반 설계가 주가 되며, 표현이 다소 복잡할 수 있음 - 시스템 내 상태를 직접 이용 않으므로, 정밀한 동작 제어가 어려움 - 설계 과정에서 전달함수 표현이 복잡하고, 상태를 직접적으로 제어하기 어려움 ㅇ 제어 구조 - 시스템 출력 일부가 피드백으로 되돌아와, 이를 비교하는, 오차 e(t) = r(t) − y(t)를 이용 - 이 오차를 바탕으로 제어 입력 u(t) = K e(t) = K ( r(t) − y(t) )을 구성3. 상태 피드백 제어 (State Feedback Control) ㅇ 내부 상태 변수를 직접 측정하고, 이를 토대로 제어 입력을 결정 ㅇ 특징 - 모든 상태 정보를 알 수 없으나, . 추정기(estimator) 또는 옵저버(observer) 사용하여 상태 변수를 추정함 - 표현,설계가 쉽고 우수한 성능 구현 용이 . 설계의 직관성과 수학적 표현의 단순성 - 시스템 동적 특성을 직접 제어 가능 . 단, 완전 가제어성 가정 하에 사용 ㅇ 제어 구조 - 시스템의 입출력 신호를 기반으로 상태를 추정한 뒤, - 추정된 상태를 이용한 상태 피드백 제어기를 적용하여 . 상태 피드백 제어 : {# u(t) = -Kx(t) + r(t) #} - 결과적으로, 출력 피드백 제어기를 간접적으로 구현하는 형태로 실현됨 . (A − B·K)의 고유값을 설계자가 원하는 위치로 배치하여, . 시스템의 과도응답 및 안정성을 조절할 수 있음
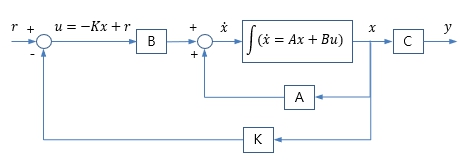 [# \dot{x}(t) = Ax(t) + Bu(t) \\ \qquad = Ax(t) + B \left( -Kx(t) + r(t) \right) \\ \qquad = (A - BK)x(t) + B r(t) \\ y(t) = Cx(t) #]
[# \dot{x}(t) = Ax(t) + Bu(t) \\ \qquad = Ax(t) + B \left( -Kx(t) + r(t) \right) \\ \qquad = (A - BK)x(t) + B r(t) \\ y(t) = Cx(t) #]
▷
피드백 루프
1. 피드백 2. 피드백 제어 3. 출력피드백제어 상태피드백제어 비교 4. 개루프제어 피드포워드제어 비교 5. 루프 이득 표현 6. 루프 전달함수 표현 "본 웹사이트 내 모든 저작물은 원출처를 밝히는 한 자유롭게 사용(상업화포함) 가능합니다"
[정보통신기술용어해설]