MAP Maximum A Posteriori, MAP Rule MAP 규칙, MAP 복호 규칙, MAP 결정 규칙, MAP 판정 규칙 | (2025-01-23) |
최대 사후확률 판정, 최대 사후확률 규칙, 최대 사후확률 복호 | |
▷
Top
▷
정보기술(IT)
▷
인공지능
▷
결정이론
▷ Top ▷ 통신/네트워킹 ▷ 통신이론 ▷ 디지털 통신 ▷ 최적 검출/결정/판정/복호
▷ Top ▷ 통신/네트워킹 ▷ 통신이론 ▷ 디지털 통신 ▷ 최적 검출/결정/판정/복호
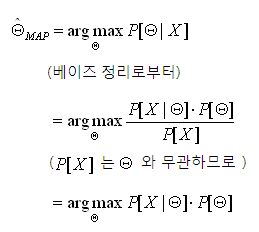
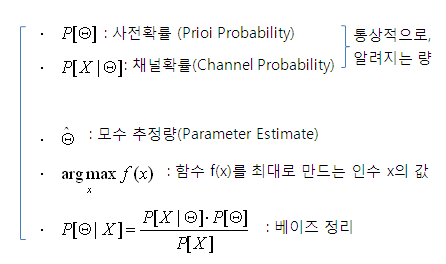
1. MAP 규칙 (MAP 수신기 규칙) (MAP : Maximum A Posteriori) ㅇ 최적 수신기 등에서 사용하는 결정 규칙 중 하나 - (크게, ML 규칙, MAP 규칙 2가지로 구분) ㅇ 사후확률을 최대화시키는 유형/부류(Category)로 분류하는 결정규칙 임 - 이는, 등가적으로, 수신기에서 오류확률을 최소화시키도록 수신 심볼을 판정하는 것과 같음 ㅇ 규칙 기준 - 유형/부류별로 사후확률의 최대화를 정량적 기준으로 삼음 2. [참고사항] ㅇ 사전확률, 사후확률 비교 - 사전확률(Priori)은, 이미 알려진 고정 값을 갖으므로, 추론/결정/판정에 영향을 미치지 않음 - 사후확률(Posteriori)은, 발생된(관찰된) 사건 마다, 원인이 되는 유형별로 다른 크기 값을 갖음 . 각 관측 결과 마다 분류범주 개수 만큼 확률 계산을 해야 함 ㅇ MAP 규칙, ML 규칙 간의 비교 ☞ MAP ML 비교 참조 - `사후확률의 최대화를 결정규칙으로 삼는 것은, MAP 규칙(최대 사후확률 규칙)` 임 - 그러나 대개, 사후 확률 계산식에서, - 사전에 주어지는 가설이나, 송신 신호 종류별 사전확률을, 모르거나 불분명한 경우가 많으므로, - 오로지 `우도 만으로 결정규칙을 삼는 것이, 최대우도 결정규칙(ML 규칙)` 임 3. 최대 사후확률 규칙 (Maximum A Posteriori, MAP Rule)의 수학적 표현 ㅇ `이진 분류`의 MAP 규칙 - 둘 중 사후확률이 큰 부류로 분류시키는 규칙ㅇ `일반 분류 (다진 분류, 유형별 분류)`의 MAP 규칙 - 어떤 모수
의 추정량
에 대해 사후확률
을 최대화시키는 규칙
▷
최적 검출/결정/판정/복호
1. 디지털통신 수신기 2. 오류 확률 3. 오류확률 해석 4. 오류확률 비교 5. 결정규칙 6. ML 규칙 7. MAP 규칙 8. 경판정, 연판정 9. argmin,argmax "본 웹사이트 내 모든 저작물은 원출처를 밝히는 한 자유롭게 사용(상업화포함) 가능합니다"
[정보통신기술용어해설]